Diferencialinis proporcingas-integralinis reguliatorius - tai automatinėse sistemose montuojamas įtaisas, skirtas tam tikram parametrui palaikyti, kuris gali keistis.
Iš pirmo žvilgsnio tai painu, tačiau PID valdymą galima paaiškinti ir manekenams, t. y. žmonėms, kurie nėra gerai susipažinę su elektroninėmis sistemomis ir prietaisais.
Turinys
Kas yra PID valdiklis?
PID valdiklis yra į valdymo grandinę įtrauktas įtaisas su privalomu grįžtamuoju ryšiu. Jis skirtas nustatytiems lygiams, pvz., oro temperatūrai, palaikyti.
Įrenginys, remdamasis iš jutiklių ar siųstuvų gautais duomenimis, valdikliui perduoda valdymo signalą arba išėjimo signalą. Valdikliai pasižymi dideliu pereinamųjų procesų tikslumu ir veikimo kokybe.
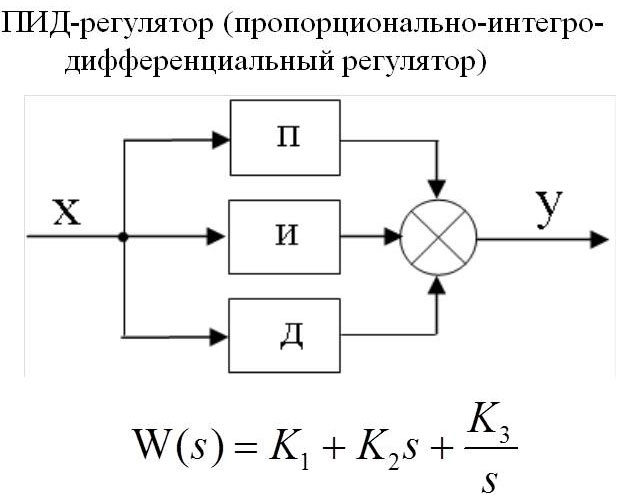
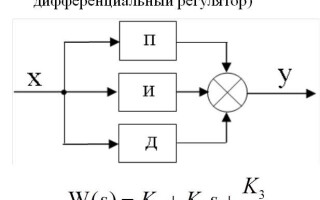
Trys PID valdiklio koeficientai ir veikimo principas
PID valdiklio funkcija - pateikti išėjimo signalą apie galią, reikalingą kontroliuojamam parametrui išlaikyti iš anksto nustatytame lygyje. Norint apskaičiuoti vertę, naudojama sudėtinga matematinė formulė, kurią sudaro 3 koeficientai - proporcinis, integralinis ir diferencinis.
Kaip valdymo objektą paimkime rezervuarą su vandeniu, kuriame reikia palaikyti tam tikro lygio temperatūrą reguliuojant garo vožtuvo atidarymo laipsnį.
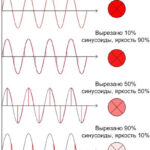
Proporcinis komponentas atsiranda nesutapimo su įvesties duomenimis momentu. Paprasčiau tariant, tai skamba taip: imamas skirtumas tarp faktinės ir pageidaujamos temperatūros, padauginamas iš reguliuojamo koeficiento ir gaunamas išėjimo signalas, kurį reikia perduoti vožtuvui. Kitaip tariant, kai tik temperatūra nukrenta, pradedamas šildymo procesas; kai tik ji pakyla virš norimos temperatūros, jis išjungiamas arba net atšaldomas.
Toliau eina integralinis komponentas, skirtas kompensuoti aplinkos ar kitų trikdančių veiksnių poveikį, kad būtų palaikoma nustatyta temperatūra. Kadangi visada yra papildomų veiksnių, darančių įtaką valdomiems prietaisams, skaičius keičiasi jau tada, kai gaunami duomenys proporcingai sudedamajai daliai apskaičiuoti. Kuo didesnė išorinė įtaka, tuo didesni skaičiaus svyravimai. Pasitaiko galios tiekimo šuolių.
Integralinis komponentas bando grąžinti temperatūros vertę, remdamasis ankstesnėmis vertėmis, jei jos pasikeitė. Procesas išsamiau aprašytas toliau pateiktame vaizdo įraše.
Tuomet reguliatoriaus išėjimo signalas pagal koeficientą perduodamas temperatūrai didinti arba mažinti. Laikui bėgant pasirenkama vertė, kuri kompensuoja išorinius veiksnius, ir šuoliai išnyksta.
Integralas naudojamas klaidoms pašalinti apskaičiuojant statinę paklaidą. Svarbiausia šiame procese yra parinkti teisingą koeficientą, kitaip klaida (nesutapimas) turės įtakos ir integralinei sudedamajai daliai.
Trečiasis PID komponentas yra diferencinis komponentas. Jis skirtas kompensuoti vėlavimo, atsirandančio tarp poveikio sistemai ir grįžtamojo ryšio, poveikį. Proporcinis valdiklis tiekia energiją tol, kol temperatūra pasiekia reikiamą vertę, tačiau perduodant informaciją į prietaisą visada pasitaiko klaidų, ypač esant didelėms vertėms. Tai gali sukelti perkaitimą. Diferencialas numato nuokrypius, atsirandančius dėl vėlavimo ar aplinkos poveikio, ir iš anksto sumažina tiekiamą galią.
PID valdiklio nustatymas
PID valdiklis derinamas dviem būdais:
- Sintezė apima parametrų apskaičiavimą pagal sistemos modelį. Toks derinimas yra tikslus, tačiau tam reikia gerai išmanyti automatinio valdymo teoriją. Tai gali padaryti tik inžinieriai ir mokslininkai. Kadangi reikia atsižvelgti į srauto charakteristikas ir atlikti daugybę skaičiavimų.
- Rankinis metodas pagrįstas bandymais ir klaidomis. Tai atliekama paimant jau esamos sistemos duomenis ir šiek tiek pakoreguojant vieną ar kelis reguliatoriaus koeficientus. Įjungus ir stebint galutinį rezultatą, parametrai keičiami norima kryptimi. Ir taip toliau, kol bus pasiektas pageidaujamas našumo lygis.
Teorinė analizė ir derinimo metodai praktikoje taikomi retai, nes trūksta žinių apie valdymo objekto charakteristikas ir daugybę galimų trikdančių poveikių. Labiau paplitę eksperimentiniai metodai, pagrįsti sistemos stebėjimu.
Šiuolaikiniai automatizuoti procesai įgyvendinami kaip specializuoti moduliai, kuriuos kontroliuoja programinė įranga, skirta reguliatoriaus koeficientams reguliuoti.
PID valdiklio paskirtis
PID valdiklis skirtas tam tikrai vertei - temperatūrai, slėgiui, rezervuaro lygiui, srautui vamzdyne, ko nors koncentracijai ir t. t. - palaikyti reikiamame lygyje, keičiant vykdymo mechanizmų, pavyzdžiui, automatinio valdymo vožtuvų, valdymo veiksmą, jo nustatymui naudojant proporcines, integruojančias, diferencijuojančias vertes.
Taikymo tikslas - gauti tikslų valdymo signalą, kuriuo galima valdyti didelius įrenginius ir net elektrinės reaktorius.
Temperatūros reguliavimo grandinės pavyzdys
PID valdikliai dažnai naudojami temperatūros valdymui, kaip šio automatinio proceso pavyzdį paimkime paprastą vandens šildymo rezervuare pavyzdį.
Bakas pripildomas skysčio, kurį reikia pašildyti iki reikiamos temperatūros ir palaikyti reikiamą lygį. Rezervuaro viduje yra temperatūros jutiklis - termoporos. termoporos arba varžinis termometras ir yra tiesiogiai prijungtas prie PID valdiklio.
Skysčiui pašildyti tieksime garus, kaip parodyta toliau pateiktame paveikslėlyje, su automatiniu valdymo vožtuvu. Pats vožtuvas gauna signalą iš valdiklio. Operatorius į PID valdiklį įveda temperatūrą, kurią reikia palaikyti rezervuare.

Jei valdiklio koeficientai yra neteisingi, vandens temperatūra šoktels, o vožtuvas bus visiškai atidarytas ir visiškai uždarytas. Tokiu atveju reikia apskaičiuoti ir iš naujo įvesti PID koeficientus. Jei tai daroma teisingai, po trumpo laiko sistema išsilygins ir temperatūra rezervuare bus palaikoma nustatyta temperatūra, o valdymo vožtuvo atidarymo laipsnis bus vidurinėje padėtyje.
Susiję straipsniai: